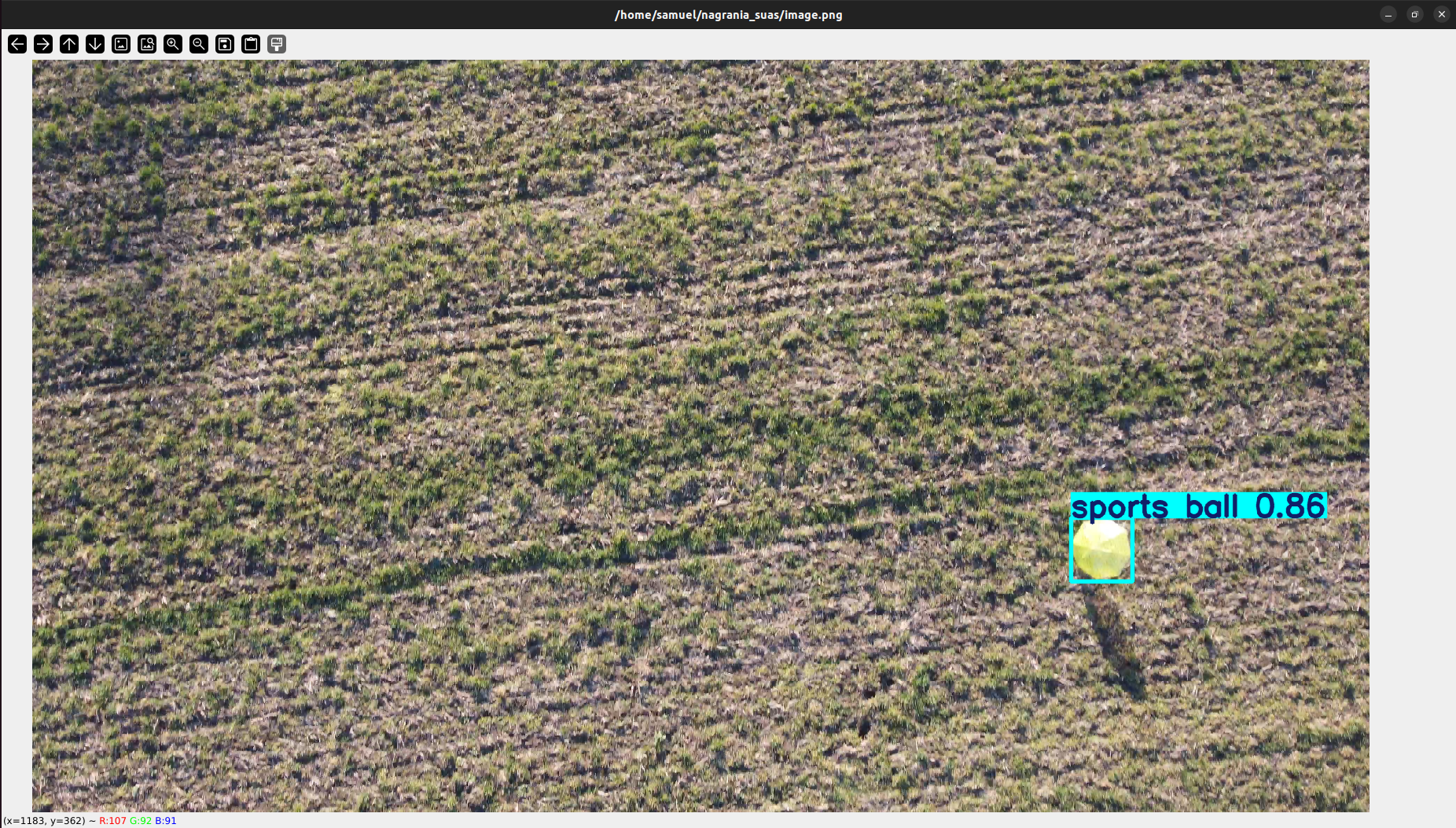
We took our drone to the local fields to conduct real-world testing of the YOLO object detection model, evaluating its performance in an outdoor environment.
This test was aimed at simulating a more practical use case and assessing how well the model detects objects in different lighting conditions and backgrounds.

The outcome wasn’t bad, but we realized there’s still room for improvement.
Some tuning of the object detection algorithm is needed to enhance its accuracy and robustness in dynamic environments like this one.
We will continue refining the system to ensure optimal performance during future trials.